

Three options come to mind for determining which contactless sensor to use when measuring objects at a distance: photoelectric sensors, ultrasonic sensors, and radar detection. Understanding the key differences among these types of technologies and how they work can help you decide which technology will work best for your application.
Photoelectric sensor

The photoelectric sensor has an emitter that sends out a light source. Then a receiver receives the light source. The common light source LED (Light Emitting Diodes), has three different types:
-
- Visible light (usually red light) has the shortest wavelength, but allows for easy installment and alignment as the light can be seen.
- Lasers are amplified beams that can deliver a large amount of energy over a distance into a small spot, allowing for precise measurement.
- Infrared light is electromagnetic radiation with wavelengths longer than visible light, generally making them invisible to the humans. This allows for infrared to be used in harsher environments that contain particles in the air.
Along with three types of LEDs, are three models of photoelectric sensors:
-
- The retro-reflective sensor model includes both an emitter and receiver in one unit and a reflector across from it. The emitter sends the light source to the reflector which then reflects the light back to the receiver. When an object comes between the reflector and the emitter, the light source cannot be reflected.
- The through-beam sensor has an emitter and receiver in two separate units installed across from the emitter. When an object breaks the light beam, the receiver cannot receive the light source.
- The diffuse sensor includes an emitter and receiver built into one unit. Rather than having a reflector installed across from it the light source is reflective off the object back to the receiver.
The most common application for photoelectric sensors is in detecting part presence or absence. Photoelectric sensors do not work well in environments that have dirt, dust, or vibration. They also do not perform well with detecting clear or shiny objects.
Ultrasonic sensor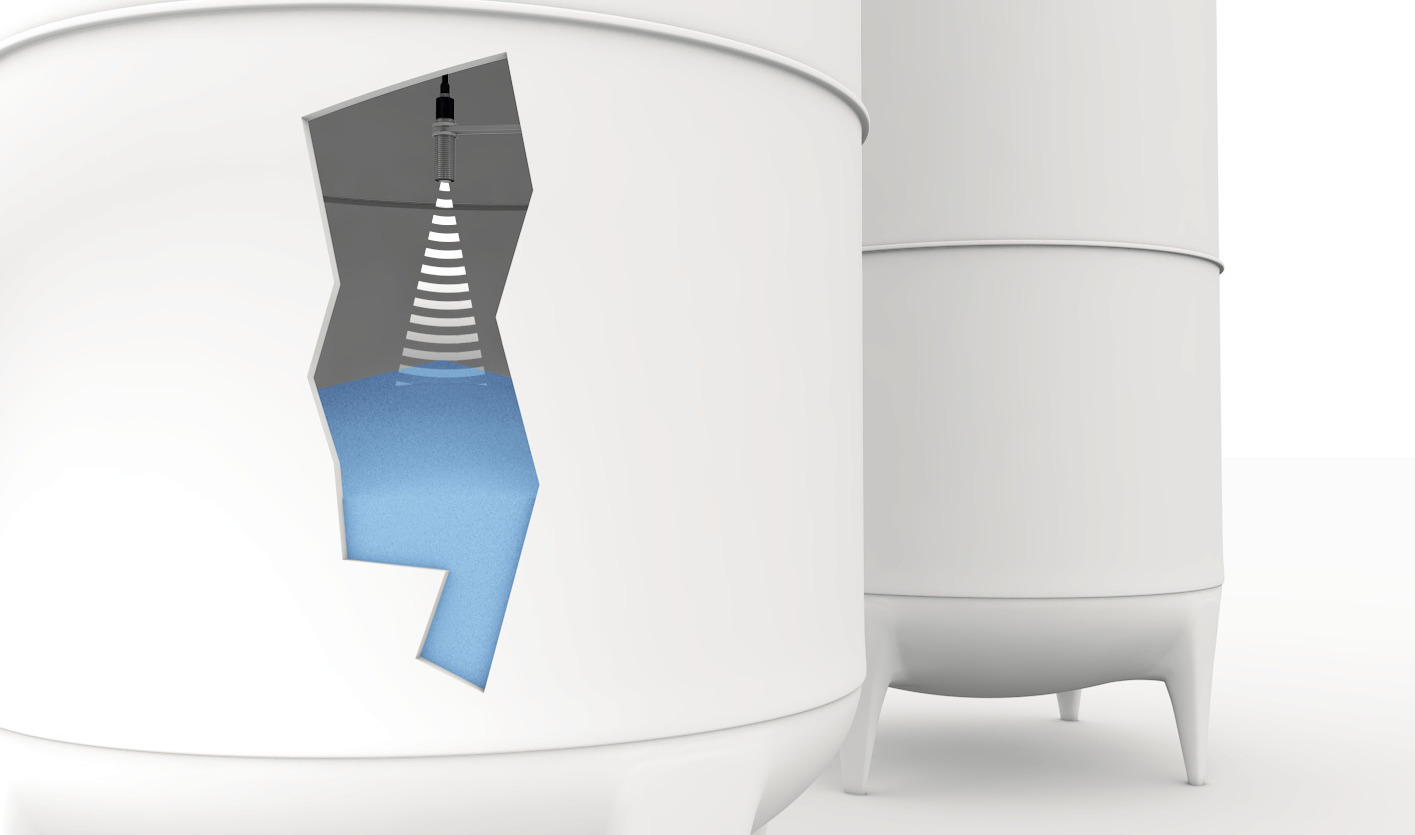
The ultrasonic sensor has an emitter that sends a sound wave at a frequency higher than what a human can hear to the receiver. The two modes of an ultrasonic sensor include:
-
- Echo mode, also known as a diffused mode, has an emitter and receiver built into the same unit. The object detection works with this mode is that the emitter sends out the sound wave, the wave then bounces off the target and returns to the receiver. The distance of an object can be determined by timing how long it takes for the sound wave to bounce back to the receiver.
- The second type of mode is the opposed mode. The opposed mode has the emitter and receiver as two separate units. Object detection for this mode works by the emitter will be set up across from the receiver and will be sending sound waves continuously and an object will be detected once it breaks the field, similarly to how photoelectric sensors work.
Common applications for ultrasonic sensors include liquid level detection, uneven surface level detection, and sensing clear or transparent objects. They can also be used as substitutes for applications that are not suitable for photoelectric sensors.
Ultrasonic sensors do not work well, however, in environments that have foam, vapors, and dust. The reason for this is that ultrasonic uses sound waves need a medium, such as air, to travel through. Particles or other obstructions in the air interfere with the sound waves being produced. Also, ultrasonic sensors do not work in vacuums which don’t contain air.
Radar detection
Radar is a system composed of a transmitter, a transmitting antenna, a receiving antenna, a receiver, and a processor. It works like a diffuse mode ultrasonic sensor. The transmitter sends out a wave, the wave echoes off an object, and the receiver receives the wave. Unlike a sound wave, the radar uses pulsed or continuous radio waves. These wavelengths are longer than infrared light and can determine the range, angle, and velocity of objects. radar also has a processor that determines the properties of the object.
Common applications for radar include speed and distance detection, aircraft detection, ship detection, spacecraft detection, and weather formations. Unlike ultrasonic sensors, radar can work in environments that contain foam, vapors, or dust. They can also be used in vacuums. Radio waves are a form of electromagnetic waves that do not require a transmission medium to travel. An application in which radar does not perform well is detecting dry powders and grains. These substances have low dielectric constants, which are usually non-conductive and have low amounts of moisture.
Choosing from an ultrasonic sensor, photoelectric sensor, or radar comes down to the technology being used. LEDs are great at detecting part presences and absence of various sizes. Sound waves are readily able to detect liquid levels, uneven surfaces, and part presence. Electromagnetic waves can be used in environments that include particles and other substances in the air. It also works in environments where air is not present at all. One technology is not better than the other; each has its strengths and its weaknesses. Where one cannot work, the others typically can.

