
Safety device users face a dilemma when selecting safety components: They want to create a high-performance system, using best-in-class parts, but this often means buying from multiple suppliers. Connecting these devices to the safety control system to create an integrated system can be complicated and may require different cabling/wiring configurations, communications interfaces and/or long, hardwired cables.
Device-Level Protocols
One solution, discussed in a previous blog on industrial safety protocols, is to connect devices to an open, device-level protocol such as Safety Over IO-Link or AS-i Safety At Work. These protocols offer a simple way to connect devices from various suppliers using non-proprietary technologies. Both Safety Over IO-Link and AS-i Safe offer modules to which many third party devices can be connected.
Connecting to a Safety Hub
The simplest way to connect to a safety hub/module is to buy compatible products from the hub supplier. Many safety block/hub suppliers also offer products such as E-stops, safety light curtains, door switches, inductive safety sensors and guard locking switches which may provide plug & plug solutions. There are, however, also many third party devices which can also be easily connected to some of these hubs. Hubs which are AIDA (Automation Initiative of German Domestic Automobile manufacturers) compliant allow connection of devices which are compatible with this standard. Generally, these devices have M12 connectors with 4, 5 or 8 pins, and the power, signal and ground pins are defined in the AIDA specifications. Most major safety device manufacturers offer at least one variant of their main products lines, which are AIDA pin-compatible.
AIDA/Safety Hub Compatible Devices
Some suppliers have lists of devices which meet the M12 pin/connector AIDA specification and may be connected to AIDA compatible modules. Note that not all the listed safety devices may have been tested with the safety blocks/hubs, but their specifications match the requirements. AIDA compatible devices have been identified from all major safety suppliers including Balluff, Rockwell, Sick, Schmersal, Banner, Euchner and Omron STI; and range from safety light curtains to door switches to E-stop devices.
Easy Connection
While some manufacturers prefer to focus on locking customers into a single supplier solution, many users want to combine devices from multiple suppliers in a best-in-class solution. Selecting a safety I/O block or hub which supports AIDA compatible devices makes it fast and easy to connect a wide range of these devices to create the safety system that is the best solution for your application.

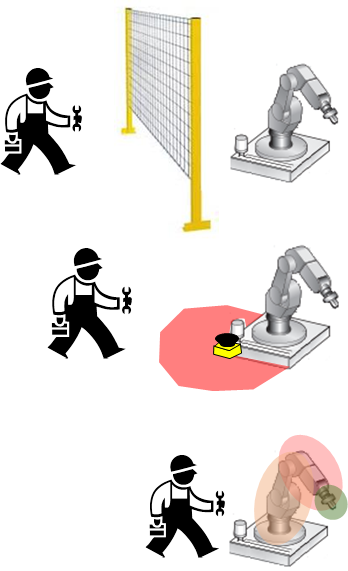 The typical machine/robot guarding scheme of the past used fences or hard guards to separate the human from the machine. Doors were controlled with safety interlock switches, which required the machine to stop on access, such as to load/unload parts or to perform maintenance or service, and this reduced productivity. It was also not 100% effective because workers inside a machine area or work cell might not be detected if another worker restarted the stopped machine. Other drawbacks included the cost of space, guarding, installation, and difficultly changing the work cell layout once hard guarding had been installed.
The typical machine/robot guarding scheme of the past used fences or hard guards to separate the human from the machine. Doors were controlled with safety interlock switches, which required the machine to stop on access, such as to load/unload parts or to perform maintenance or service, and this reduced productivity. It was also not 100% effective because workers inside a machine area or work cell might not be detected if another worker restarted the stopped machine. Other drawbacks included the cost of space, guarding, installation, and difficultly changing the work cell layout once hard guarding had been installed.





